Traveling Salesperson Problem¶
Problem Definition¶
Given:
- A list of cities (or nodes).
- The distances or costs between each pair of cities.
Objective:
- Find the shortest possible route that visits each city exactly once and returns to the starting city.
Example¶
- Suppose there are four cities: A, B, C, and D.
- The distances between them are:
| A | B | C | D | E |
|---|---|---|---|---|
| A → B: 10 | ||||
| A → C: 15 | B → C: 35 | |||
| A → D: 20 | B → D: 25 | C → D: 30 | ||
| A → E: 12 | B → E: 17 | C → E: 26 | D → E: 23 | |
| A → F: 24 | B → F: 28 | C → F: 13 | D → F: 13 | E → F: 27 |
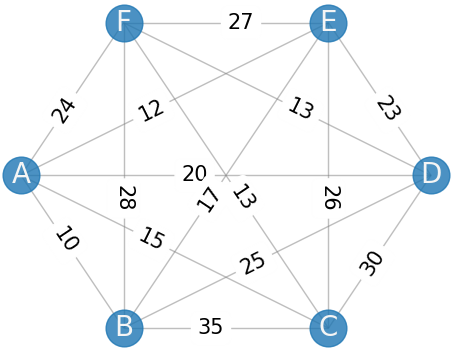
The task is to determine the sequence of cities (e.g., A → B → C → D → E → F → A) that minimizes the total distance traveled.
Applications¶
- Logistics and Delivery: Optimizing routes for delivery trucks or couriers.
- Manufacturing: Designing efficient robotic arms or conveyor belts.
- Tourism: Creating optimal travel itineraries.
Complexity¶
- Computationally Hard: TSP is NP-hard, meaning there's no known polynomial-time algorithm to solve it for all cases.
- For (n) cities, there are ((n-1)!) possible routes.
Solution Approaches¶
Exact Algorithms:
- Brute Force: Explore all possible routes (impractical for large (n)).
- Dynamic Programming.
- Mixed Integer Linear Programming (MILP).
Heuristic and Approximation Methods:
- Greedy Algorithms.
- Genetic Algorithms.
- Simulated Annealing.
- Ant Colony Optimization.
Machine Learning
Mixed-Integer Linear Program (MILP) Formulation¶
The Traveling Salesperson Problem (TSP) can be formulated as a Mixed-Integer Linear Program (MILP). Below is a typical formulation:
Sets¶
- $i$, $j$: Cities (nodes).
Parameters¶
- $ c_{ij} $: Cost or distance of traveling from city $i$ to city $j$.
- $ n $: Number of cities.
Variables¶
Decision Variables:
- $ x_{ij} \in \{0, 1\} $: Binary variable indicating whether the path from city $i$ to city $j$ is included in the tour.
- $ x_{ij} = 1 $: Path from city $i$ to $j$ is used.
- $ x_{ij} = 0 $: Path from city $i$ to $j$ is not used.
- $ x_{ij} \in \{0, 1\} $: Binary variable indicating whether the path from city $i$ to city $j$ is included in the tour.
Auxiliary Variables (for subtour elimination):
- $ u_i $: A continuous variable representing the order in which city $i$ is visited, used to eliminate subtours.
Objective Function:¶
Minimize the total travel cost: $$ \min_{x_{ij}, u_i} \quad \sum_{i=1}^{n} \sum_{j=1, j \neq i}^{n} c_{ij} x_{ij} $$
Constraints:¶
Each city is entered exactly once: $$ \sum_{i=1, i \neq j}^{n} x_{ij} = 1 \quad \forall j = 1, \dots, n $$
Each city is exited exactly once: $$ \sum_{j=1, j \neq i}^{n} x_{ij} = 1 \quad \forall i = 1, \dots, n $$
Subtour elimination constraints (Miller-Tucker-Zemlin formulation): $$ u_i - u_j + n \cdot x_{ij} \leq n - 1 \quad \forall i, j = 2, \dots, n, \; i \neq j $$ $$ 1 \leq u_i \leq n - 1 \quad \forall i = 2, \dots, n $$
The basic formulation with decision variables $x_{ij}$ ensures each city is visited exactly once but does not inherently prevent subtours (i.e., tours that visit only a subset of cities). These constraints force the auxiliary variable $u_i$ to ensure that a valid sequence of cities is followed. If $x_{ij} = 1$ (i.e., there is a path from $i$ to $j$), then $u_i < u_j$.
Pyomo formulation¶
# Import libraries
import numpy as np
import pandas as pd
import pyomo.environ as pyo
from pyomo.core.util import quicksum
import highspy
# Pyomo model
def pyomo_model(n: int):
"""
:param n: Number of cities
:return: algrebaic model
"""
tsp = pyo.AbstractModel()
# Sets
tsp.i = pyo.RangeSet(1, n)
tsp.j = pyo.RangeSet(1, n)
# Parameters
tsp.C_ij = pyo.Param(tsp.i, tsp.j, doc='Cost of traveling from i to j')
# Variables
tsp.x_ij = pyo.Var(tsp.i, tsp.j, doc='Indicates whether the path from i to j is included', within=pyo.Binary)
tsp.u_i = pyo.Var(tsp.i, doc='Represents the order in which i is visited', bounds=(1, n-1), within=pyo.PositiveReals)
# Model definition
# Objective Function
tsp.objective = pyo.Objective(rule=objective, sense=pyo.minimize, doc='Minimize Cost')
# Add Constraints
tsp.c_visit_once = pyo.Constraint(tsp.j, rule=c_visit_once, doc='Visit Once')
tsp.c_leave_once = pyo.Constraint(tsp.i, rule=c_leave_once, doc='Leave Once')
tsp.c_subtour_elimination = pyo.Constraint(tsp.i, tsp.j, rule=c_subtour_elimination, doc='Subtour Elimination')
return tsp
# Objective function
def objective(m):
return quicksum(m.C_ij[i, j] * m.x_ij[i, j] for i in m.i for j in m.j if j!=i)
# Constraints
def c_visit_once(m, j):
return sum(m.x_ij[i, j] for i in m.i if j!=i) == 1
def c_leave_once(m, i):
return sum(m.x_ij[i, j] for j in m.j if j!=i) == 1
def c_subtour_elimination(m, i, j):
if i != j and i>=2 and j>=2:
return m.u_i[i] - m.u_i[j] + len(m.i) * m.x_ij[i, j] <= len(m.i) - 1
return pyo.Constraint.Skip
cost = [[ 0, 10, 15, 20, 12, 24],
[10, 0, 35, 25, 17, 28],
[15, 35, 0, 30, 26, 13],
[20, 25, 30, 0, 23, 13],
[12, 17, 26, 23, 0, 27],
[24, 28, 13, 13, 27, 0]]
n = len(cost)
c_ij = {(i+1, j+1): cost[i][j] for i in range(n) for j in range(n)}
# Data
data = {
None: {
# Parameters
'C_ij': c_ij
}
}
# Create instance model
tsp = pyomo_model(n)
tsp_instance = tsp.create_instance(data)
# Solve problem with Highspy
solver = pyo.SolverFactory('appsi_highs')
solver.solve(tsp_instance, tee=True)
Coefficient ranges:
Matrix [1e+00, 6e+00]
Cost [1e+01, 4e+01]
Bound [1e+00, 5e+00]
RHS [1e+00, 5e+00]
Presolving model
32 rows, 35 cols, 120 nonzeros 0s
32 rows, 35 cols, 120 nonzeros 0s
Objective function is integral with scale 1
Solving MIP model with:
32 rows
35 cols (30 binary, 0 integer, 0 implied int., 5 continuous)
120 nonzeros
Nodes | B&B Tree | Objective Bounds | Dynamic Constraints | Work
Proc. InQueue | Leaves Expl. | BestBound BestSol Gap | Cuts InLp Confl. | LpIters Time
0 0 0 0.00% 0 inf inf 0 0 0 0 0.0s
0 0 0 0.00% 90.4 inf inf 0 0 0 17 0.0s
R 0 0 0 0.00% 90.4 91 0.66% 26 4 0 23 0.0s
Solving report
Status Optimal
Primal bound 91
Dual bound 91
Gap 0% (tolerance: 0.01%)
Solution status feasible
91 (objective)
0 (bound viol.)
0 (int. viol.)
0 (row viol.)
Timing 0.00 (total)
0.00 (presolve)
0.00 (postsolve)
Nodes 1
LP iterations 23 (total)
0 (strong br.)
6 (separation)
0 (heuristics)
{'Problem': [{'Lower bound': 91.0, 'Upper bound': 91.0, 'Number of objectives': 1, 'Number of constraints': 0, 'Number of variables': 0, 'Sense': 1}], 'Solver': [{'Status': 'ok', 'Termination condition': 'optimal', 'Termination message': 'TerminationCondition.optimal'}], 'Solution': [OrderedDict({'number of solutions': 0, 'number of solutions displayed': 0})]}
# Display results
x_ij = tsp_instance.x_ij.extract_values()
C_ij = tsp_instance.C_ij.extract_values()
u_i = tsp_instance.u_i.extract_values()
u_i[1] = 0 # First city
u_i = [k for k, v in sorted(u_i.items(), key=lambda item: item[1])]
u_i.append(1) # Come back to first city
for i in range(len(u_i)-1):
print(f"Travel from {u_i[i]} to {u_i[i+1]} and Cost {C_ij[(u_i[i],u_i[i+1])]}")
Travel from 1 to 3 and Cost 15 Travel from 3 to 6 and Cost 13 Travel from 6 to 4 and Cost 13 Travel from 4 to 5 and Cost 23 Travel from 5 to 2 and Cost 17 Travel from 2 to 1 and Cost 10